巨大義手の製作03 量産型の作り方まとめ [巨大義手]
巨大義手試作二号機の製作は一旦休憩して、ダンボール製の量産型ロボットハンドを作りました。
簡単ではありますが、作り方の備忘録を残しておきます。
<用意するもの>
・ハサミ
・カッターナイフ
・セロテープ
・たこ糸
・ストロー(2本ぐらい)
・ペットボトル
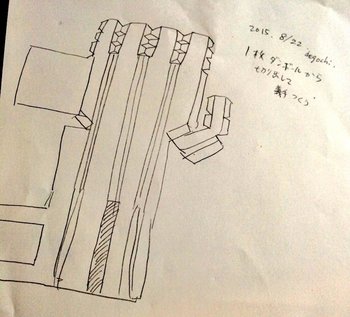
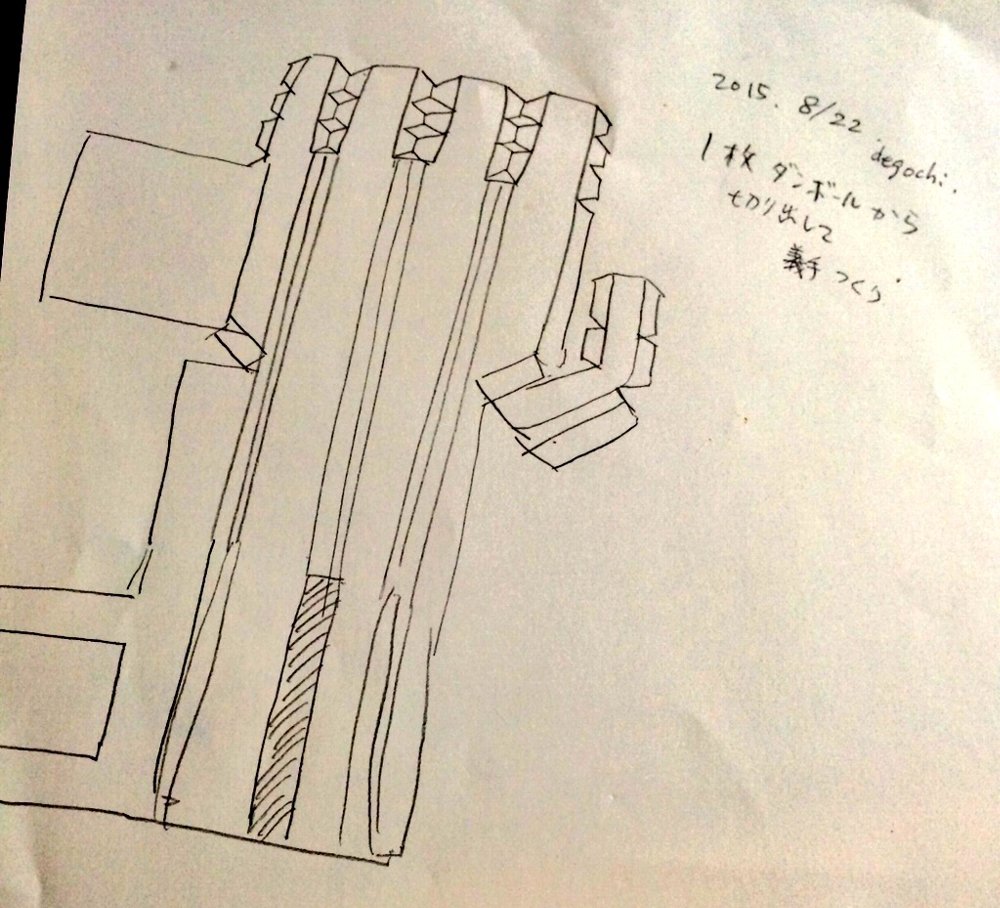
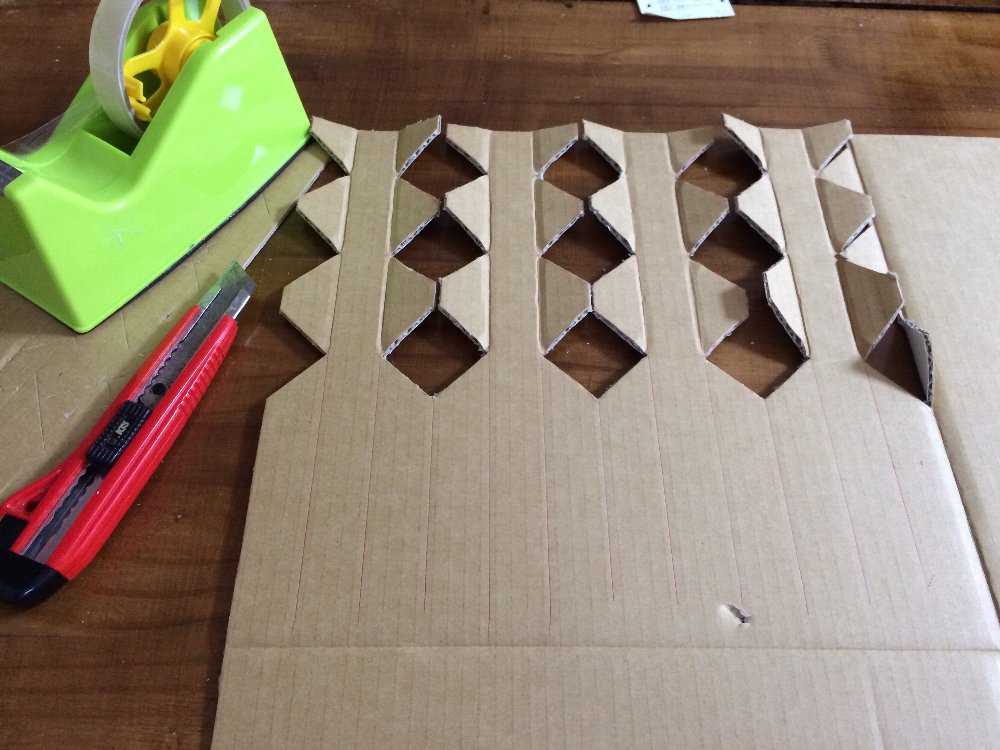
まずはラフスケッチをしてアイデア検討。複数パーツを組み合わせるのは大変なので、ダンボール1枚を切りぬいて作る方針としました。
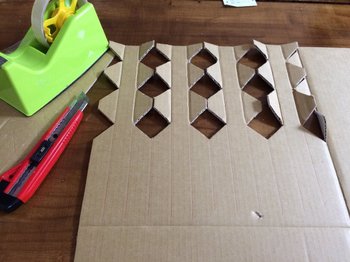
型を決めたら、型の通りにダンボールを切って、折り曲げて形を作っていきます。

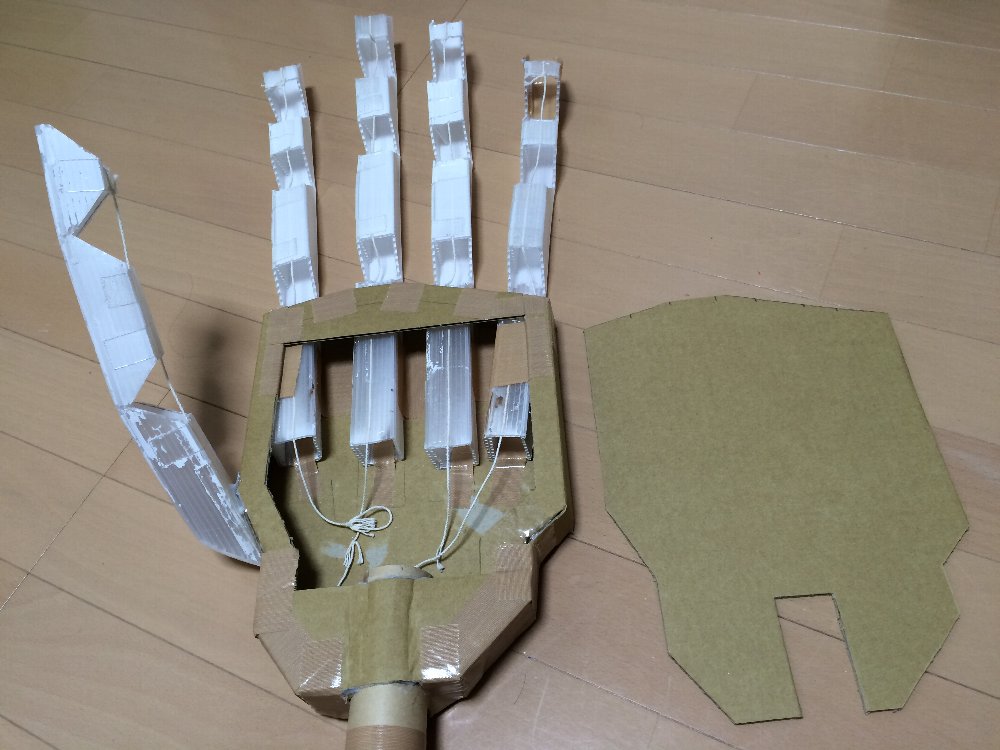
ロボットハンドを動かすために使うタコ糸を通すストローを切ります。1cm程度の長さで19個に切り分けます。

ストローは指の先端を除いた、指の腹の部分にセロテープで取り付けます。

指先にタコ糸を結び、取り付けたストローを通して手首側まで糸を引きまわしておきます。


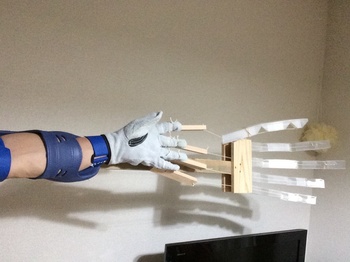
タコ糸が引かれるとロボットハンドの指が曲がります。この動きは、人間の指とだいたい同じ機構です。
ただ、人間の手の機構を単純化して再現しているだけなので、指を伸ばす方向の力は別のもので与えておかなければなりません。(曲げたら曲げっぱなしになってしまう)
そこで、ペットボトルを1cm程度の幅でロボットハンドの指の長さ分の短冊にして、板バネとして使います。
指に差しこんで指の根元の方でセロテープで留めておきます。

タコ糸の調整などは、使用者の手の形に合わせて工夫する必要があります。調整すると下記動画のような操作が可能になります。
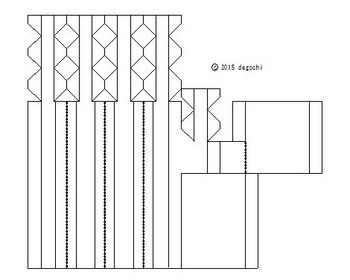
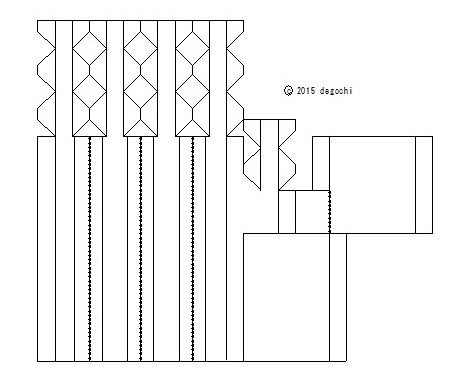
今回作ったロボットハンドの型紙は下記のイメージです。作れる人はこれだけの情報でも作れると思います。
もうちょっと詳細にしたものを作って本当に工場に発注して、組み立てキットとして販売してみようかしらと検討中。需要あるのかしら。
簡単ではありますが、作り方の備忘録を残しておきます。
<用意するもの>
・ハサミ
・カッターナイフ
・セロテープ
・たこ糸
・ストロー(2本ぐらい)
・ペットボトル
まずはラフスケッチをしてアイデア検討。複数パーツを組み合わせるのは大変なので、ダンボール1枚を切りぬいて作る方針としました。
型を決めたら、型の通りにダンボールを切って、折り曲げて形を作っていきます。

ロボットハンドを動かすために使うタコ糸を通すストローを切ります。1cm程度の長さで19個に切り分けます。

ストローは指の先端を除いた、指の腹の部分にセロテープで取り付けます。

指先にタコ糸を結び、取り付けたストローを通して手首側まで糸を引きまわしておきます。


タコ糸が引かれるとロボットハンドの指が曲がります。この動きは、人間の指とだいたい同じ機構です。
ただ、人間の手の機構を単純化して再現しているだけなので、指を伸ばす方向の力は別のもので与えておかなければなりません。(曲げたら曲げっぱなしになってしまう)
そこで、ペットボトルを1cm程度の幅でロボットハンドの指の長さ分の短冊にして、板バネとして使います。
指に差しこんで指の根元の方でセロテープで留めておきます。

タコ糸の調整などは、使用者の手の形に合わせて工夫する必要があります。調整すると下記動画のような操作が可能になります。
今回作ったロボットハンドの型紙は下記のイメージです。作れる人はこれだけの情報でも作れると思います。
もうちょっと詳細にしたものを作って本当に工場に発注して、組み立てキットとして販売してみようかしらと検討中。需要あるのかしら。
巨大義手の製作02 試作二号機の動作確認とFRP強化 [巨大義手]
巨大義手を継続して製作中です。
前回の一号機が未完成だったので、パーツを流用して二号機を作り始めました。
指のパーツを外して、ダンボールでボディを作りテープで固定していきます。
ロボットハンドっぽい、かっこいい形を目指すものの、いかんせん、美的センスはないので残念な感じですが調整しながら形にしていきます。


腕部分は、いままで木製だったものを軽量化のために中空の紙製パイプに変更しました。

腕に装着する部分もひとまず紙ベースで作ります。また、この巨大義手は紐で動かす単純な構造ですが、素人工作でのアバウトな作りであるため調整などメンテナンスが必須だと思います。よって、手のひらの部分を開けられるように、蓋で閉じるような構造を採用しました。

二号機の動作確認も記録しておきました。単純な構造ですが、非常に効率的に動いてくれているように見えます。親指の糸の張り方は、もう少し検討の余地がありますが、作りながら修正する方針です。
この紙ベースの上に樹脂を塗りFRPで強化していきます。
FRPは本格的に使ったことがないのですが、見よう見まねで練習がてら使って慣れていくことにします。

FRPの材料は、樹脂が500gで1200円、硬化剤が200円、ガラスマットが1m四方で1000円程度です。
ガラスマットは普通のハサミでザクザクと切れます。張り付ける部分よりもやや大きめに切るのがよさそうです。


ガラスマットをある程度揉んだ上で、張り付けたい部分の位置合わせをします。素人としては、実際に樹脂を塗りつける前にずれないように、簡単な糊などで仮留めしておけばよかったなと今思います。

樹脂をコップに100g程度取って硬化剤を入れて混ぜます。
よく混ぜたら、樹脂を刷毛に取って先ほどのガラスマットに垂らしていきます。塗るというよりも、少し垂らしてトントンとガラスマットの上から刷毛で叩いて空気を抜きながらガラスマットを原型に貼りつけていきます。刷毛は固めの方が使いやすいと思いました。

空気などが入らないように樹脂を塗れると、原型が透けて見えるようになりました。こういうノウハウを貯めてFRPを上手く使えるようになりたいです。
前回の一号機が未完成だったので、パーツを流用して二号機を作り始めました。
指のパーツを外して、ダンボールでボディを作りテープで固定していきます。
ロボットハンドっぽい、かっこいい形を目指すものの、いかんせん、美的センスはないので残念な感じですが調整しながら形にしていきます。


腕部分は、いままで木製だったものを軽量化のために中空の紙製パイプに変更しました。

腕に装着する部分もひとまず紙ベースで作ります。また、この巨大義手は紐で動かす単純な構造ですが、素人工作でのアバウトな作りであるため調整などメンテナンスが必須だと思います。よって、手のひらの部分を開けられるように、蓋で閉じるような構造を採用しました。
二号機の動作確認も記録しておきました。単純な構造ですが、非常に効率的に動いてくれているように見えます。親指の糸の張り方は、もう少し検討の余地がありますが、作りながら修正する方針です。
この紙ベースの上に樹脂を塗りFRPで強化していきます。
FRPは本格的に使ったことがないのですが、見よう見まねで練習がてら使って慣れていくことにします。

FRPの材料は、樹脂が500gで1200円、硬化剤が200円、ガラスマットが1m四方で1000円程度です。
ガラスマットは普通のハサミでザクザクと切れます。張り付ける部分よりもやや大きめに切るのがよさそうです。


ガラスマットをある程度揉んだ上で、張り付けたい部分の位置合わせをします。素人としては、実際に樹脂を塗りつける前にずれないように、簡単な糊などで仮留めしておけばよかったなと今思います。

樹脂をコップに100g程度取って硬化剤を入れて混ぜます。
よく混ぜたら、樹脂を刷毛に取って先ほどのガラスマットに垂らしていきます。塗るというよりも、少し垂らしてトントンとガラスマットの上から刷毛で叩いて空気を抜きながらガラスマットを原型に貼りつけていきます。刷毛は固めの方が使いやすいと思いました。

空気などが入らないように樹脂を塗れると、原型が透けて見えるようになりました。こういうノウハウを貯めてFRPを上手く使えるようになりたいです。
巨大義手の製作01 試作一号 [巨大義手]
秋は近所の神社で例大祭があります。
お祭りでは餅投げと言って、餅やお菓子をなげられ、それをキャッチする行事があります。
毎年なかなかうまくキャッチ出来ないので、それを改善するアイデアを検討し、手を大きくすればいいんじゃね?という結論に辿りつきました。
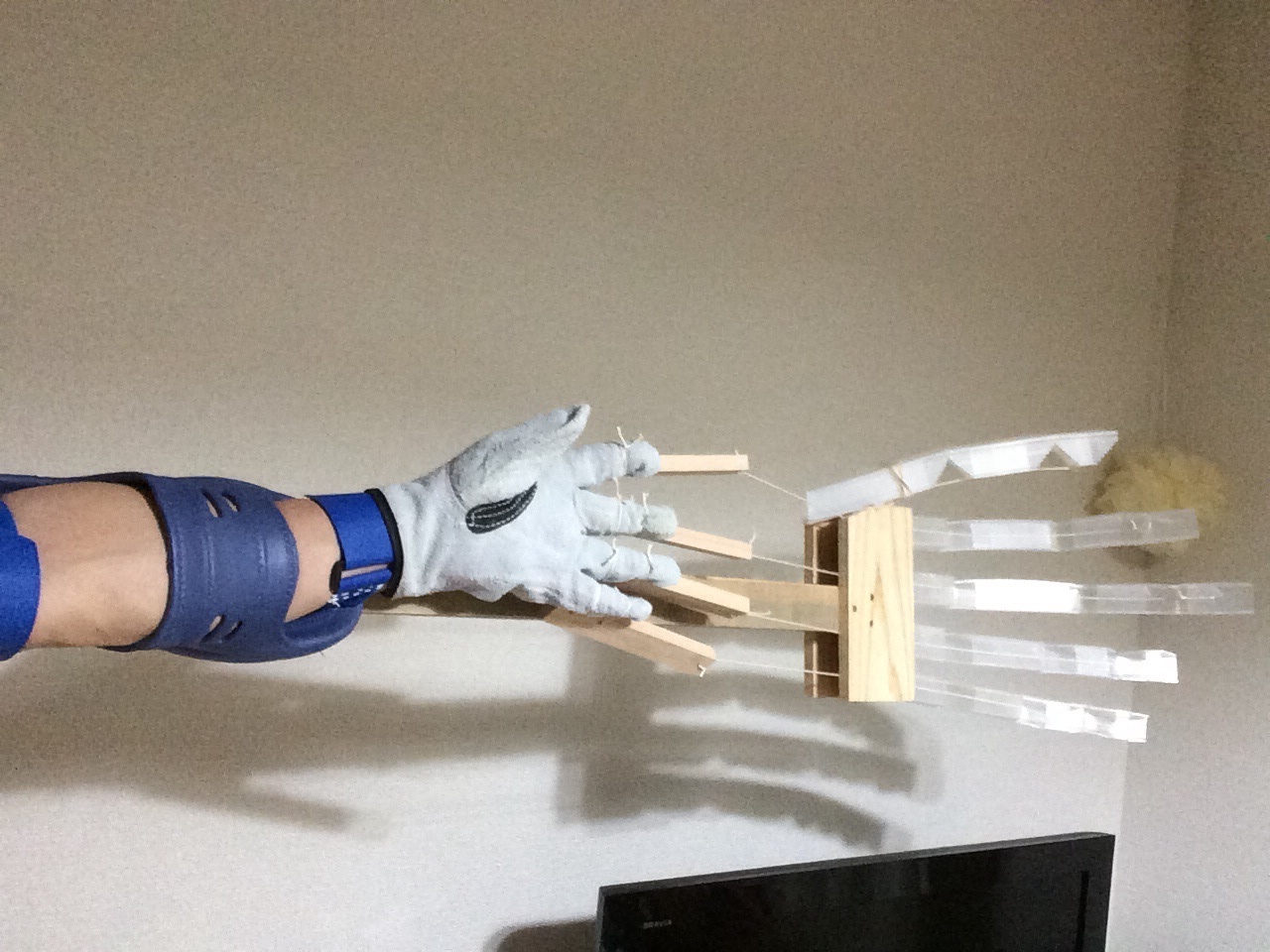
で、思いつくままに試作品を製作しました。

材料はプラスチック製の養生シートと木材、凧糸です。
糸を引くことで各指が独立して動きます。

親指は試作のため動作対象からは外しました。
動作確認も記録しておきました。
今後は操作系を改善して、見た目も改造していきたいと思います。
お祭りでは餅投げと言って、餅やお菓子をなげられ、それをキャッチする行事があります。
毎年なかなかうまくキャッチ出来ないので、それを改善するアイデアを検討し、手を大きくすればいいんじゃね?という結論に辿りつきました。
で、思いつくままに試作品を製作しました。

材料はプラスチック製の養生シートと木材、凧糸です。
糸を引くことで各指が独立して動きます。

親指は試作のため動作対象からは外しました。
動作確認も記録しておきました。
今後は操作系を改善して、見た目も改造していきたいと思います。
degochi さん

工作物一覧
各工作ごとに製作日記をまとめたシリーズです。
興味を引くものがあれば一気読みができます。
ホッキョクグマ着ぐるみ
蒲田くんケチャップ
ラーメン屋台
巨大義手
自作スプラチャージャー
タライ落とし動画
自作空圧マシンガン
マンガ肉を忠実に再現
自作ビール
iphone5用革ケース
エグゾーストキャノン
ハッピーセット分解
ドイツ民族衣装
ライトセーバー(製作中)
海賊熊ベポ着ぐるみ
PEN用レザーケース
リングレールガン
ワラスボ型ルアー
ミニチュア風写真
ジャッカロープ
カヌー
液晶で使えるガンコン(既製品)
勝手にいいちこ
フロントホック式メガネ
子供用机
ナウシカマスク
貝殻Tシャツ
早飲みジョッキ
タンス
ペットボトルロケット
ガーデンブランコ
その他の工作
東山動物園
ニューヨークの記録2009
フィルムカメラ
その他
ホッキョクグマ着ぐるみ
蒲田くんケチャップ
ラーメン屋台
巨大義手
自作スプラチャージャー
タライ落とし動画
自作空圧マシンガン
マンガ肉を忠実に再現
自作ビール
iphone5用革ケース
エグゾーストキャノン
ハッピーセット分解
ドイツ民族衣装
ライトセーバー(製作中)
海賊熊ベポ着ぐるみ
PEN用レザーケース
リングレールガン
ワラスボ型ルアー
ミニチュア風写真
ジャッカロープ
カヌー
液晶で使えるガンコン(既製品)
勝手にいいちこ
フロントホック式メガネ
子供用机
ナウシカマスク
貝殻Tシャツ
早飲みジョッキ
タンス
ペットボトルロケット
ガーデンブランコ
その他の工作
東山動物園
ニューヨークの記録2009
フィルムカメラ
その他
